AeroTestra UAS supports University of Hawaii at Hilo in FAA approved UAV flights at National Park
On July 18 2016 University of Hawaii at Hilo's SDAV Lab, under a COA from the FAA, operated multiple UAV flights overPuuhonua O Honaunau National Historic Park. A first since the ban was established in June of 2014.
The project was spearheaded by Adam Johnson, Chief of integrated resources management for the park. Working for over a year to gain approval for the sensitive operations, he dealt with with, not only the restrictions of UAS operations in national parks, but also the sensitive historic archaeological site the park protects.
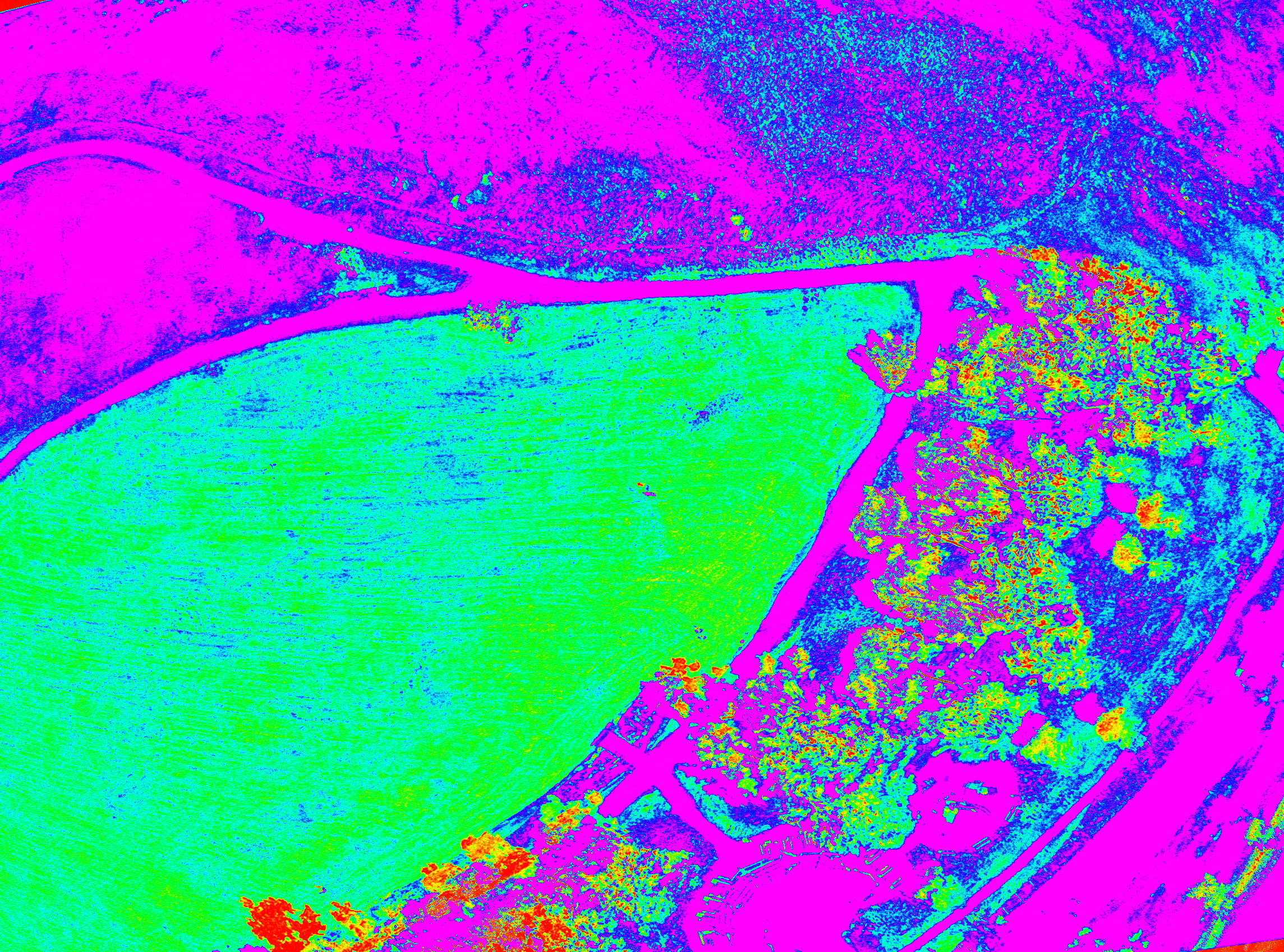
Partnering with University's Spatial Data and Visualization Lab the goal was to create a baseline measurement of the healthy coconut trees in the park and attempt to identify the cause and scope of an illness that is affecting them. Two AeroTestra multirotor platforms were equipped, one with a high resolution visual range camera and the other a Headwall Nano hyper-spec sensor . Capable of measuring discreet variations in the vegetation's reflectance signatures, hyper-spectral data has long been used by satellites and manned aircraft systems for ground classification and agricultural monitoring .

Ryan Perroy, Assistant Professor at the university and chief investigator on this project, is a strong supporter of unmanned systems as a valuable research tool providing the ability to collect high quality data while having a minimal disruptive impact. Projects the lab has worked on range from lava flow monitoring to invasive species detection.
The flights were carried out by Nathan Stephenson , pilot in command, and research assistant at the university labs, supervising Sean Headrick of AeroTestra, in charge of operating the unmanned vehicles.
By all accounts the missions were a complete success due to the diligent effort of everyone involved. This should provide a good example of the value UAS can provide as the industry opens to commercial use in the coming months.
“ I was confident and at ease the whole time knowing the expertise overseeing the flights and operations and level of care and attention that went into the planning and execution. Thank you for that providing that peace of mind.”
Tammy Duchesne
Superintendent, Pu'uhonua o Honaunau & Kaloko-Honokohau National Historical Parks